|
2. Bluetooth + Arduino LED Buttons mit Processing (Folie 1231) |
Im folgenden wird wie im vorherigen Beispiel mit Hilfe von 2 Buttons eine LED ein- und
ausgeschaltet. Diese Buttons werden jetzt aber mit der Library ControlP5 in Processing erzeugt.
Diese Library muss nachtrõglich eingerichtet werden. Dazu geht man folgenderma▀en vor.
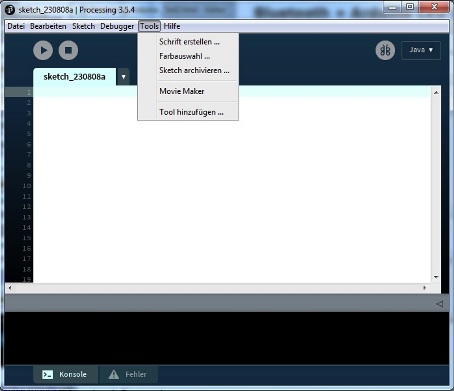
In der obersten Menueleiste geht man auf Tools.
Es ÷ffnet sich ein Fenster mit den Karten Libraries - Modes - Tools - Examples.
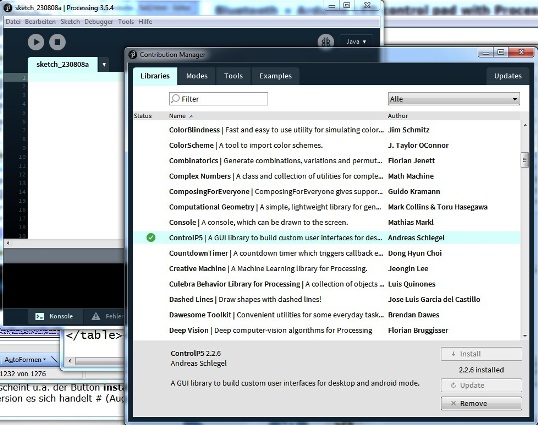
Hier wõhlt man Libraries und scrollt zu ControlP5|A GUI to build custom user interfaces ...
Andreas Schlegel. Dieses klickt man an und es erscheint u.a. der Button install.
Gleichzeitig wird auch angegeben, um welche Version es sich handelt. Man klickt nun auf
install. Damit wird diese Library installiert.
(August 2023: Version 2.2.6).
Dieses Beispiel findet man so õhnlich auch auf folgender Seite:
Hackster
|
|
|
Auf der folgenden Seite (Bild) gibt es eine ausf³hrliche Darstellung aller m÷glichen grafischen
Elemente mit Beispiel-Code.
Die Seite hat folgende Adresse:
http://www.sojamo.de/libraries/controlP5/
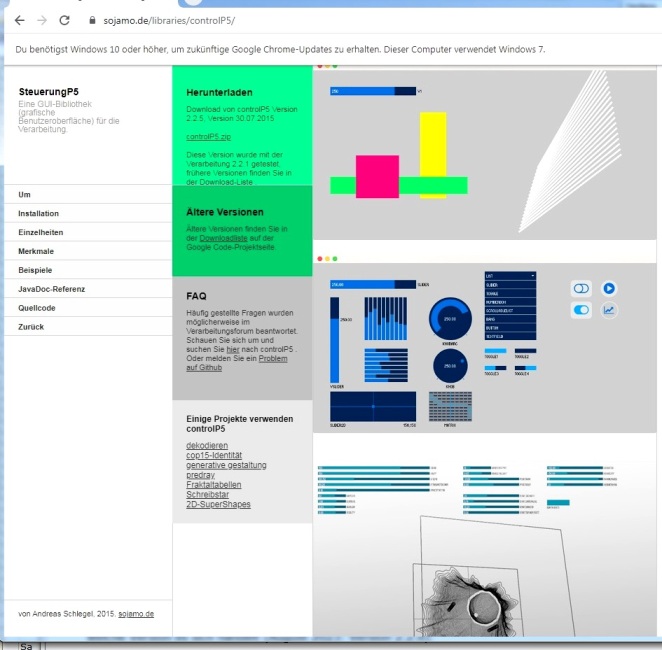
Die Library kann auch von der folgenden Seite heruntergeladen werden,
als zip-Datei (Dateiname: controlP5-master.zip (1,1MB)).
https://github.com/sojamo/controlp5
Auf der github-Seite sind auch einige Beispiele mit entsprechender Grafik
dargestellt.
|
|
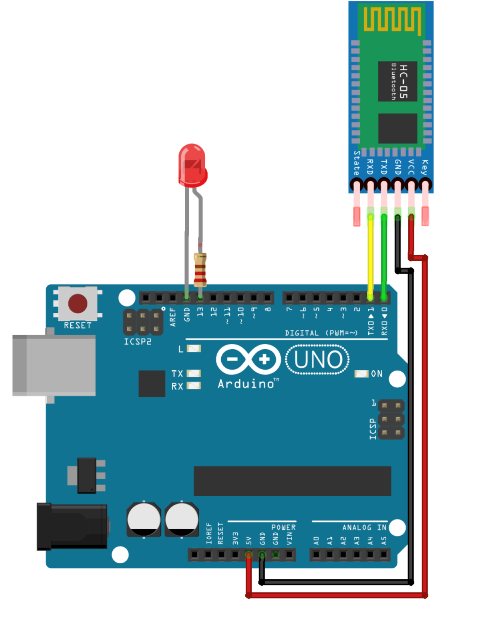
Die Verkabelung bei diesem Beispiel ist dieselbe wie beim vorangegangenen Beipiel.
Die einzelnen Schritte entsprechen sich ebenfalls.
Der Arduino mit der angeschlossenen LED wird ³ber das USB-Kabel mit
einem Raspberry Pi verbunden. Das Bluetooth-Modul HC-05 ist jetzt
nicht angeschlossen. Dann wird der Sketch in der Arduino-IDE auf den
Mikrocontroller hochgeladen.
Achtung: Der Port ist beim RPi /dev/ttyUSB0.
Nach dem Hochladen wird der HC-05 an das Arduino-Board angeschlossen.
Jetzt wird die Processing-IDE gestartet. Hier ist es wichtig,
den richtigen Port anzugeben. Diesen erhõlt man wie oben beschrieben.
Der Processing-Code wird hochgeladen und gestartet.
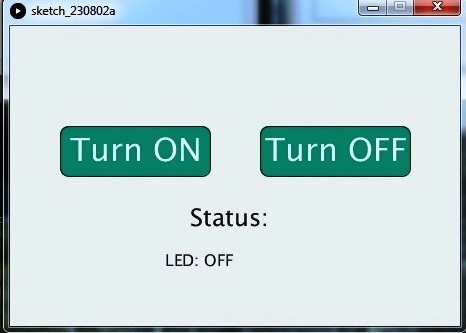
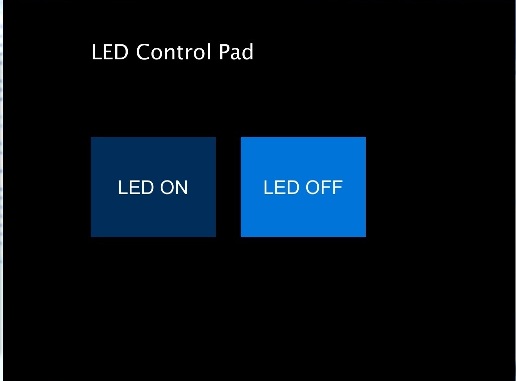
Man erhõlt ein Fenster mit zwei Button:
LED ON und LED OFF.
Diese k÷nnen jetzt wahlweise angeklickt werden und die LED verhõlt
sich dann entsprechend.
|
|
|
Zuerst lõdt man den Arduino Sketch in der Arduino-IDE auf den Arduino.
Achtung: Der Port muss richtig eingestellt sein und das Board entsprechend
gewõhlt werden. Das Bluetooth-Modul HC-05 darf nicht angschlossen sein.
|
// Der Arduino-Sketch
String incomingString; // for incoming serial data
int action;
int ledPin=13;
void setup() {
Serial.begin(9600); // opens serial port, sets data rate to 9600 bps
pinMode(ledPin, OUTPUT);}
void loop() { // send data only when you receive data:
if (Serial.available() > 0) {
// read the incoming byte:
incomingString = Serial.readString();
// say what you got:
Serial.print("String received: ");
Serial.println(incomingString);
if (incomingString == "ON")
{ action = 1;}
else if (incomingString == "OFF")
{action = 2;}
else
action = 0;
switch (action) {
case 1:
//do something when var equals 1
Serial.println("Turn ON LED");
digitalWrite(ledPin, HIGH);
break;
case 2:
//do something when var equals 2
Serial.println("Turn OFF LED");
digitalWrite(ledPin, LOW);
break;
default:
// if nothing else matches, do the default
// default is optional
Serial.println("!! Not sure what you want");
break;
} } }
Download Programm-Code
Arduino-Sketch (1 kB)
|
//Processing-Code
import processing.serial.*;
import controlP5.*;
PFont pfont;
ControlP5 cp5;
Serial myPort;
int myColor = color(0);
void setup() {
size(1024,768);
printArray(Serial.list());
myPort=new Serial(this, "COM3",9600);// Achtung: Port entsprechend õndern
cp5 = new ControlP5(this);
// replace the default controlP5 button with an image.
// button.setImages(defaultImage, rolloverImage, pressedImage);
// use button.updateSize() to adjust the size of the button and
// resize to the dimensions of the defaultImage
cp5.addButton("On")
.setCaptionLabel("LED ON")
.setPosition(175,275)
.setSize(250,200)
.updateSize();
cp5.addButton("Off")
.setCaptionLabel("LED OFF")
.setPosition(475,275)
.setSize(250,200)
.updateSize();
PFont pfont = createFont("Arial",20,true);
ControlFont font = new ControlFont(pfont,241);
cp5.getController("On")
.getCaptionLabel()
.setFont(font)
.toUpperCase(false)
.setSize(38);
cp5.getController("Off")
.getCaptionLabel()
.setFont(font)
.toUpperCase(false)
.setSize(38);
}
void draw() {
background(myColor);
text("LED Control Pad",175,120);
textSize(42);
}
public void controlEvent(ControlEvent theEvent) {
//println(theEvent.getController().getName());
print(theEvent.getController().getLabel());
println(" button has been pressed");
}
void On(){
myPort.write("ON");
println("LED ON");
}
void Off(){
myPort.write("OFF");
println("LED OFF");
}
Download Programm-Code
Processing-Code (1 kB)
|
|
3. Steuerung eines 4WD- bzw. 2WD-Cars drahtlos mit Hilfe von Processing |
|
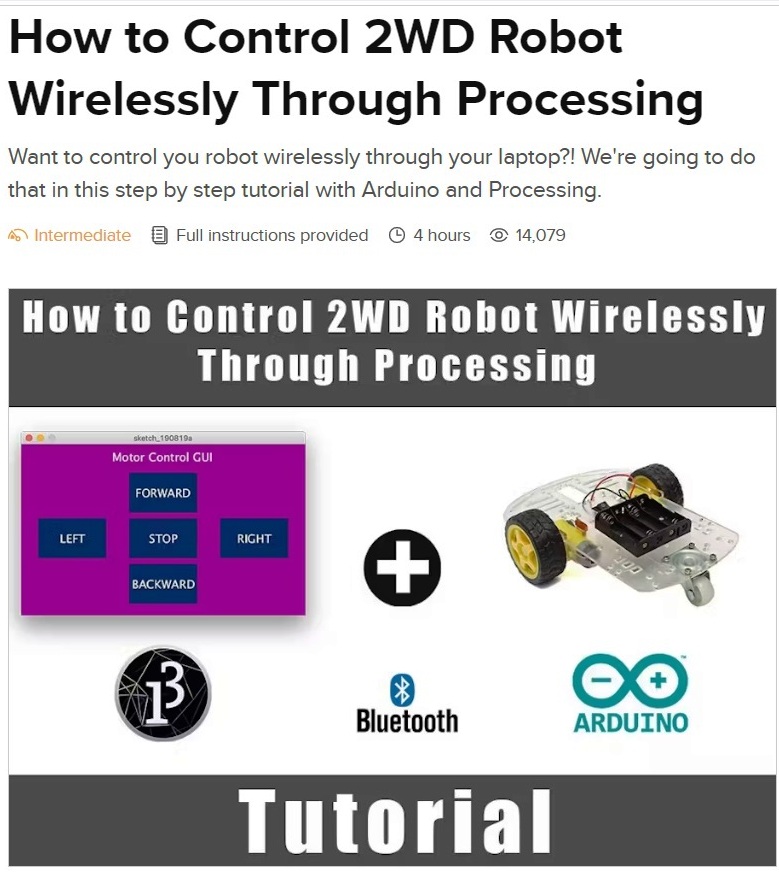
Das nõchste Beispiel behandelt die drahtlose Steuerung eines 4WD- bzw. 2WD-Cars mit
einer grafischen Oberflõche, die mit Processing programmiert wird. Das Beispiel findet man in
wesentlichen Teilen auf folgender Internetseite:
https://www.hackster.io/ahmedibrrahim/how-to-control-2wd-robot-wirelessly-through-processing-0303f0
|
|
Als erstes wird der 4WD-Car einfach ³ber die serielle Schnittstelle gesteuert. Das Bluetooth-Modul HC-05 und
die grafische Oberflõche, die mit Hilfe der Processing-IDE erstellt wird, kommen erst spõter
dazu.
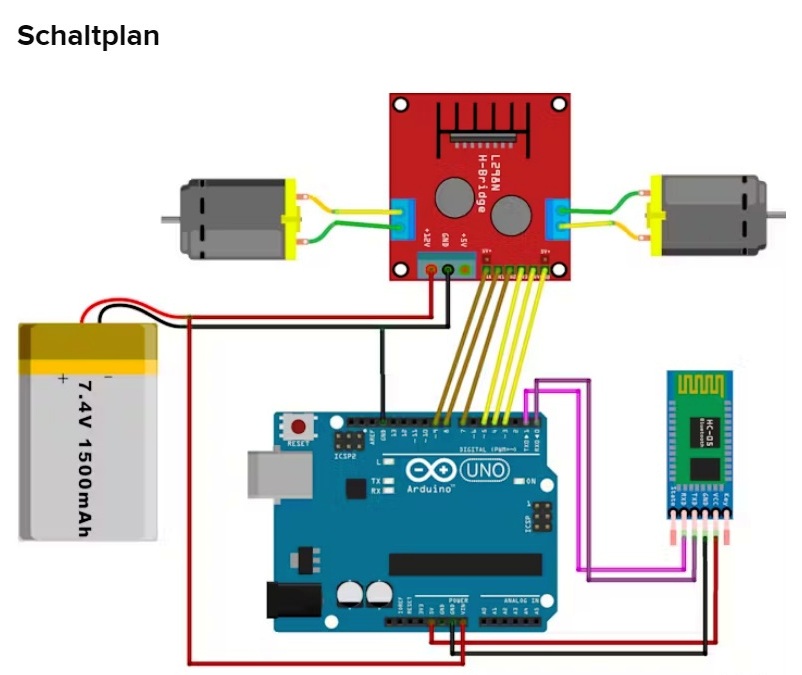
Also: Als Motortreiber wird der L298N benutzt. Er hat viele Vorteile: ist gut dokumentiert und
preiswert. Mit ihm k÷nnen zwei Gleichstrommotoren getrennt gesteuert werden. Die
Verkabelung daf³r ist auf folgendem Bild zu sehen:
|
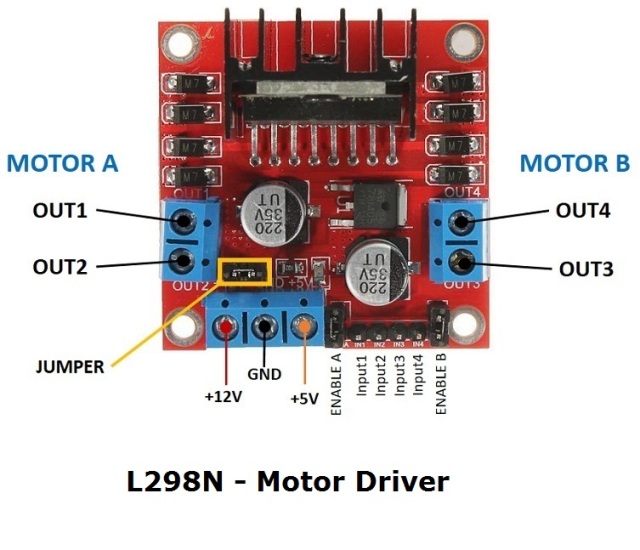
Hier erkennt man die Anschl³sse des L298N-Motortreibers. Eine sehr ausf³hrliche
Darstellung der m÷glichen Einsõtze mit einem Arduino findet man auf folgender Seite:
https://lastminuteengineers.com/l298n-dc-stepper-driver-arduino-tutorial/
|
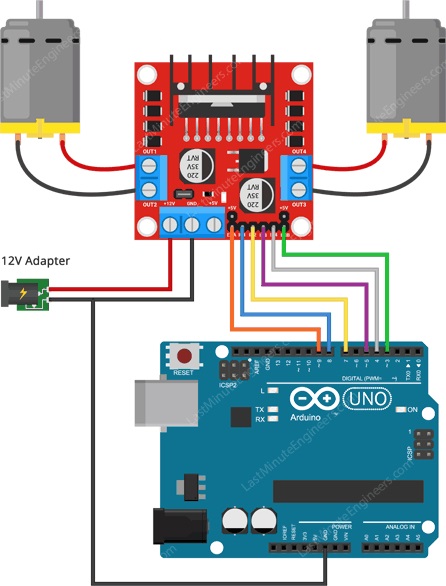
Auf diesem Schaltplan sind 2 Motoren angeschlosssen. Wenn man 4 Motoren - auf jeder Seite 2 -
steuern will, wird auf jeder Seite jeweils ein weiterer Motor parallel zu den bereits
vorhandenen Motoren dazugeschaltet.
|
|
Im Einzelnen
1. Der Arduino mit den angeschlossenen Motoren wird ³ber das USB-Kabel mit einem
Raspberry Pi verbunden. Das Bluetooth-Modul HC-05 ist noch nicht angeschlossen.
Dann wird der Sketch in der Arduino-DIE auf den Mikrocontroller hochgeladen.
Achtung: Der Port ist beim RPi /dev/ttyUSB0. Nach dem Hochladen wird der HC-05 an
das Arduino-Board angeschlossen.
|
2. Das Bluetooth-Modul (hier HC-05) muss f³r den benutzten PC angemeldet werden.
Das geschieht, indem man mit linker Maustaste auf das Bluetooth-Symbol geht und Gerõt
hinzuf³gen anklickt.
|
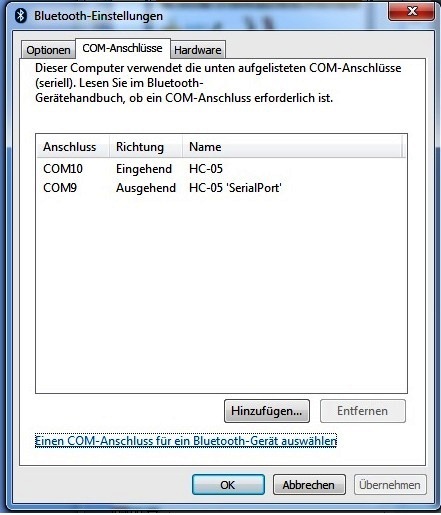
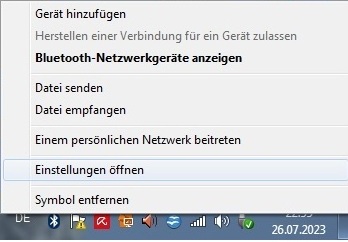
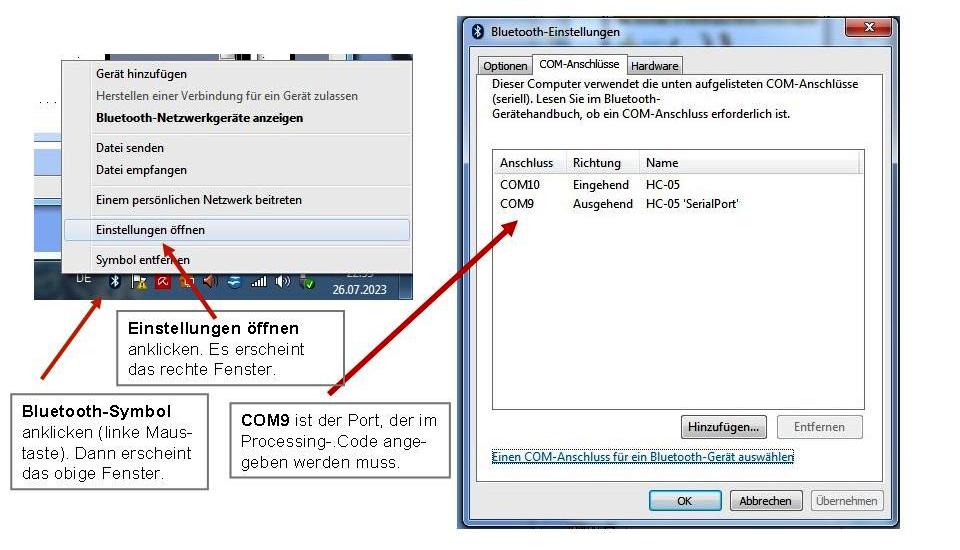
3. Jetzt wird die Processing-IDE gestartet. Hier ist es wichtig,
den richtigen Port anzugeben. Diesen erhõlt man, indem man mit der linken
Maustaste auf das Bluetooth-Symbol geht und anklickt. Im sich ÷ffnenden Fenster
geht man dann auf Einstellungen ÷ffnen. Im neuen Fenster wird der jeweilige Port
(eingehend und ausgehend) f³r das Bluetooth-Modul HC-05 angezeigt. Diesen Port muss man
sich f³r den Processing-Code merken.
|
4. Der Processing-Code wird hochgeladen und gestartet. Man erhõlt das
Fenster mit 5 Buttons: FORWARD, LEFT, STOP, RIGHT und BACKWARD. Diese k÷nnen
jetzt wahlweise angeklickt werden und die Motoren drehen sich dann entsprechend.
Hier ist der Arduino nicht am Win7-PC angeschlossen. Lediglich das Processing-Programm
wird hier ausgef³hrt und mit Hilfe des Bluetooth HC-05 auf den Arduino zugegriffen.
▄ber den Raspberry Pi wird der Arduino-Sketch auf den Arduino geladen.
|
|
|
Der folgende Arduino-Sketch wird hochgeladen und gestartet. Dazu ÷ffnet man den seriellen Monitor
und gibt entsprechend f³r die jeweiligen Richtungen f (f³r forward), b (f³r backward),
s (f³r stop), l (f³r left) und r (f³r right) ein.
|
Der Arduino-Sketch Teil 1
int in1 = 7;
int in2 = 8;
int ENA =9;
int in3=4;
int in4=5;
int ENB=3;
char command;
void setup() {
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(ENA,OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
pinMode(ENB,OUTPUT);
Serial.begin(9600);
}
void forward(){
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
analogWrite(ENA,200);
analogWrite(ENB,200);
}
void stop(){
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
analogWrite(ENA,0);
analogWrite(ENB,0);
}
void backward(){
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
analogWrite(ENA,200);
analogWrite(ENB,200);
}
|
Der Arduino-Sketch - Teil 2
void left(){
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
analogWrite(ENA,100);
analogWrite(ENB,220);
}
void right(){
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
analogWrite(ENA,220);
analogWrite(ENB,100);
}
void loop(){
if (Serial.available()>0){
command = Serial.read();
switch(command){
case 'f':
forward();
break;
case 'b':
backward();
break;
case 's':
stop();
break;
case 'l':
left();
break;
case 'r':
right();
break;
} // fuer die case-Anweisung
} // fuer die if-Anweisung
} // fuer loop
Download Programm-Code
Arduino-Sketch (2 kB)
|
|
Jetzt kommen wir zur Steuerung mit Hilfe der Processing-GUI.
Der Sketch auf dem Arduino bleibt so wie bisher. Das Bluetooth-Modul HC-05 wird jetzt
am Arduino verkabelt (siehe Schaltskizze unten).
Auf dem Windows-Rechner wird jetzt die Processing-IDE aufgerufen und der Sketch hochgeladen.
Wie oben schon erwõhnt, muss man sich den Port des Bluetooth-Moduls beschaffen und diesen
in den Processing-Code einf³gen bzw. verõndern.
Wie man den Port erhõlt, wurde schon oben beschrieben (im unteren Bild noch
einmal zusammengestellt).
|
|
|
|
|
Der Processing-Code Teil 1
import controlP5.*; //import ControlP5 library
import processing.serial.*; //import the Serial Library
PFont font; //do not change
PFont font1;
ControlP5 cp5; //create ControlP5 object
Serial port;
//create Serial object
void setup() {
size(500, 300);
cp5 = new ControlP5(this);
port = new Serial(this, "COM9", 9600);
font = createFont("verdana", 18); //font for buttons and title
font1 = createFont("Arial", 25); //font for buttons and title
cp5.addButton("forward")
.setFont(font) //font
.setPosition(190, 50)
.setSize(120, 70)
.setColorForeground(color(255,140,0))
.setColorBackground(color(102,102,0))
;
cp5.addButton("backward")
.setFont(font) //font
.setPosition(190, 210)
.setSize(120, 70)
.setColorForeground(color(255,140,0))
.setColorBackground(color(102,102,0))
;
cp5.addButton("right")
.setFont(font) //font
.setPosition(350, 130)
.setSize(120, 70)
.setColorForeground(color(255,140,0))
.setColorBackground(color(102,102,0))
;
|
Der Processing-Code Teil 2
cp5.addButton("left")
.setFont(font) //font
.setPosition(30, 130)
.setSize(120, 70)
.setColorForeground(color(255,140,0))
.setColorBackground(color(102,102,0))
;
cp5.addButton("stop")
.setFont(font) //font
.setPosition(190, 130)
.setSize(120, 70)
.setColorForeground(color(255,140,0))
.setColorBackground(color(102,102,0))
;
}
void draw() {
background(150, 190, 150);
fill(255);
textFont(font1);
text("Motor Control GUI", 160, 30);
}
void forward() {port.write('f');}
void backward() {port.write('b');}
void right() {port.write('r');}
void left() {port.write('l');}
void stop() {port.write('s');}
Download Programm-Code
Arduino-Sketch (2 kB)
|
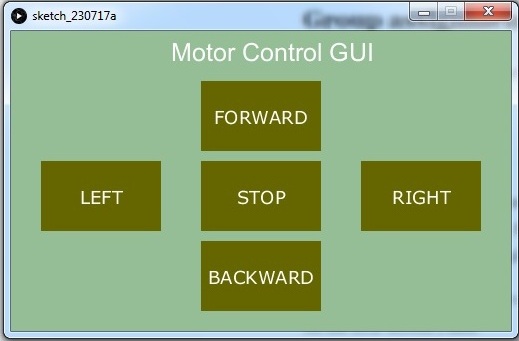
So sieht die grafische Oberflõche f³r die Steuerung des 4WD-Cars mit der Processing-IDE programmiert aus.
Die Befehle sind selbsterklõrend. Die Buttons k÷nnen entsprechend den eigenen W³nschen sowohl in der
Art der Schriftart als auch in der Farbgebung verõndert werden.
|
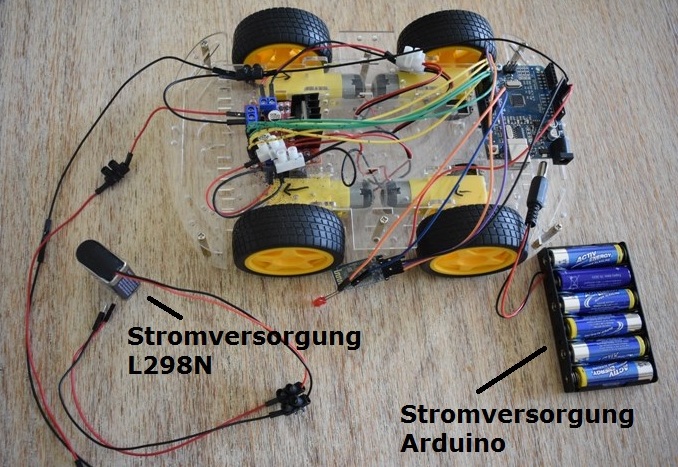
So oder õhnlich kann das fertige 4WD-Car aussehen. Die Hardware kann bei Amazon bestellt werden. Ein preisg³nstiges Set
ist EMOZNY 4 Wheel 2 Layer Robot Smart Car Chassis Kits with Speed Encoder for Arduino DIY. Dieses wird z.Zt.
f³r 15,51 Euro angeboten (Oktober 2023).
|

|

|